VDI-Forum Bildverarbeitung, Regensburg, 27./28.12.2014:
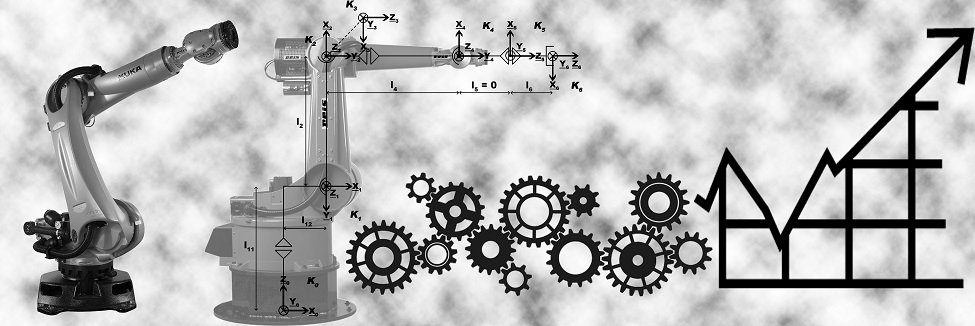
Anbei finden Sie das Poster zum Thema "CUDA-beschleunigtes Bin-Picking mit einer 3D-Kamera". Dieses Projekt befasst sich mit der Bildverarbeitung, insbesondere mit der Aufnahme, Erkennung und Verarbeitung von Informationen zum komplexen Thema "Griff in die Kiste". Meine Unterstützung konzentrierte sich auf die Roboter-Bahnplanung mithilfe eines Industrieroboters. Dabei wurden die Roboterkinematik und Kollisionsmodelle in MATLAB simuliert und anschließend in C++ in die MILAN-Software (Multi-Platform-Imaging-Language) implementiert.
